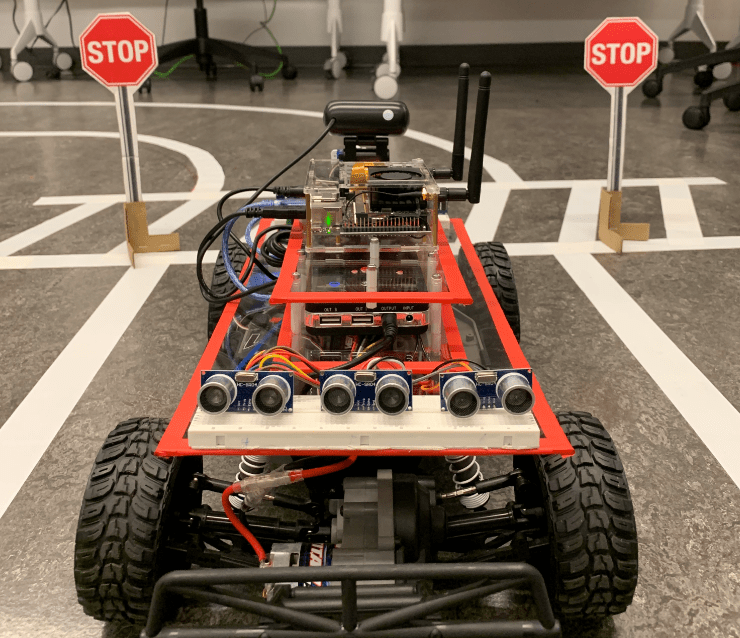
I worked on this project while an intern in the Collaborative Robotics and Smart Systems Laboratory (CRoSS) at Montclair State University. I helped develop core software for the 1/10th scale autonomous vehicle (pictured above) including obstacle detection and a Proportional Integral Derivative (PID) algorithm that allowed all elements of the vehicle to run simultaneously. I was the lead author on one paper and was co-authored on another. See the citations, an article featuring the work, and the full papers below.
Rao M., Paulino L., Robila V., Li I., Zhu M., Wang W., Training-Free Lane Tracking for 1/10th Scale Autonomous Vehicle Using Inverse Perspective Mapping and Probabilistic Hough Transforms. Proceedings 2022 12th IEEE Integrated STEM Education Conference (ISEC) pp. 406-411, DOI: 10.1109/ISEC54952.2022.10025098
Robila, V., Paulino L., Rao M., Li I., Zhu M., Wang W., Design and Implementation of PID-Based Steering Control for 1/10-Scale Autonomous Vehicle. Proceedings 2021 IEEE 12th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), pp. 0758-0762, DOI: 10.1109/UEMCON53757.2021.9666496
Rao M., Paulino L., Robila V., Li I., Zhu M., Wang W., Training-Free Lane Tracking for 1/10th Scale Autonomous Vehicle Using Inverse Perspective Mapping and Probabilistic Hough Transforms. Proceedings 2022 12th IEEE Integrated STEM Education Conference (ISEC) pp. 406-411, DOI: 10.1109/ISEC54952.2022.10025098

Leave a comment